使用實(shí)時采樣示波器測量相位噪聲——第二部分

為了檢測示波器相位噪聲測量的精度,我們使用了內(nèi)置寬帶隨機(jī)相位調(diào)制源的純凈信號源。通過在較寬的頻帶上引入相對較大的 PM(Phase Modulation的簡稱,下略) 振幅,我們可以將測量值與是德科技 E5052B 等信號源分析儀的測量值進(jìn)行對比,從而驗證兩種設(shè)備測得的噪聲水平。
在下面的測量中(圖 1),SSA 的測量結(jié)果為藍(lán)色,示波器(是德科技 MSOS804A)的測量結(jié)果為綠色。在注入的 PM范圍內(nèi)兩者呈現(xiàn)了完美的一致性。高于 2 MHz 時,由于 SSA 的本底噪聲較低,因此兩條曲線有所分離。
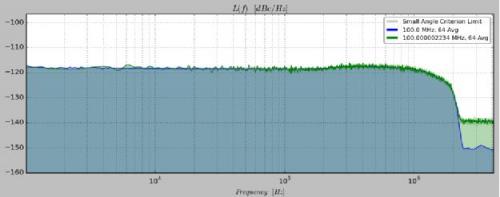
圖 1
測量本底噪聲
實(shí)時采樣示波器進(jìn)行抖動測量時的本底噪聲受垂直(電壓)精度和定時精度的影響。采樣系統(tǒng)的垂直噪聲、時間基準(zhǔn)的穩(wěn)定性、示波器自身的振蕩器的相位噪聲和示波器交織采樣體系結(jié)構(gòu)的缺陷都會給抖動測量造成誤差,進(jìn)而影響相位噪聲測量。
示波器抖動測量本底技術(shù)指標(biāo)的計算公式如下:
TIE= 噪聲邊沿轉(zhuǎn)換速率2+固有抖動2 [秒峰值]
固有抖動部分由內(nèi)部參考時基的穩(wěn)定性決定。對最高性能的示波器而言,例如 63 GHz 的是德科技 Z 系列產(chǎn)品,該值可能低至 50 fs,但必須注意該值只在相當(dāng)短的采樣時間內(nèi)有效。測量相近的相位噪聲時我們需要延長采樣時間,此時示波器的固有抖動會增加,因為示波器本身也有相位噪聲。
本底噪聲和信號轉(zhuǎn)換速率
大部分情況下式中第一項決定了抖動測量的本底噪聲。信號和示波器垂直噪聲與信號的有限轉(zhuǎn)換速率一起使得邊沿出現(xiàn)明顯的水平位移,即抖動。因此選擇垂直噪聲帶寬密度盡可能低的示波器至關(guān)重要。如果示波器可以限制任意頻率的帶寬,那么也可以改善抖動測量的本底噪聲。由于相位噪聲信息包括在帶寬2*fc 中,我們可以在很多情況下大幅降低測量噪聲。
下圖(圖 2)是使用是德科技 8GHz S 系列示波器進(jìn)行相位噪聲測量的實(shí)例。信號源為 100 MHz 正弦波,由 E8267D 超低相位噪聲信號發(fā)生器提供。E8267D 的真實(shí)相位噪聲(由 SSA 或其他合適的低相位噪聲儀器確定)遠(yuǎn)低于示波器的測量范圍,因此我們可以得到示波器的本底噪聲。
針對每次測量,示波器的帶寬進(jìn)行了如下調(diào)整:
藍(lán)色 = 8GHz,綠色 = 4GHz,紅色 = 1GHz,藍(lán)綠色 = 200MHz。
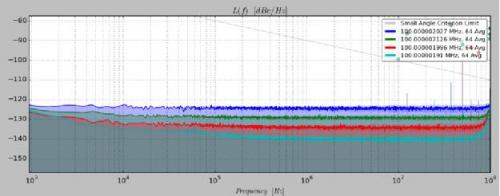
圖 2
1-10MHz 頻帶的相位本底噪聲從約 -124dBc/Hz 降至 -140dBc/Hz,在帶寬限制從 8GHz 改變至 200MHz設(shè)置下。這一點(diǎn)可以得到解釋,因為我們從8GHz 到200MHz降低了帶寬。如果示波器噪聲與帶寬呈線性關(guān)系,可以預(yù)計噪聲下降 10*log10(0.2/8) = -16dB。這一情形并不適用于所有頻點(diǎn)。低頻段時,示波器的內(nèi)部參考相位噪聲起主要作用。在較高的頻段下,我們可以看到,示波器在 200 MHz 時建立完美的磚墻式帶寬限制濾波器的能力存在局限。這意味著測量值中仍有頻率大于 200 MHz示波器噪聲。
限制示波器帶寬的好處高度取決于被測量信號的轉(zhuǎn)換速率和信號頻率與示波器全帶寬的比值。
本底噪聲與示波器內(nèi)部 PLL/振蕩器
人們常常對低頻相位調(diào)制中的相位噪聲測量很感興趣。除了前一篇文章討論過的對快速響應(yīng)和深存儲的采集要求外,時間基準(zhǔn)特別穩(wěn)定,且配有設(shè)計精良的 PLL 電路對示波器而言也非常重要,,因為這在低頻測量時起主要作用。
從下面的測試(圖 3)中可以看出,采用舊技術(shù)的示波器(綠色)在近載波時的相位噪聲高于采用新技術(shù)的示波器(藍(lán)色)。
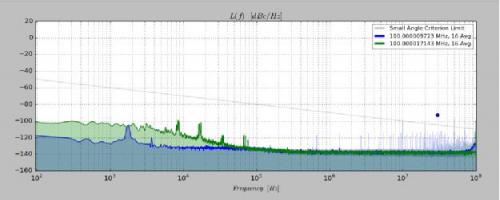
圖 3
為示波器使用外部參考時鐘,也有可能改善近載波相位噪聲,因為外部時鐘比內(nèi)部振蕩器更純凈。下圖(圖 4)為是德科技 V 系列產(chǎn)品使用內(nèi)部振蕩器(藍(lán)色)和 Wenzel 10MHz 參考時鐘(紅色)時的測量對比。
圖 4
本底噪聲和采樣率
前面已經(jīng)提到,示波器的采樣率應(yīng)保持較高,以精確地確定邊沿。如果能夠降低采樣率自然很好,因為這樣我們可以使用更少的采樣點(diǎn),從而可以加快測量速度,提高平均化效果或獲得更低的頻率偏移。但我們必須要小心,保證采樣率不會對測量精度產(chǎn)生明顯影響。
下圖(圖 5)中我們可以看到,對同一個 100 MHz 純正弦波進(jìn)行測量時,改變采樣率(帶寬始終為 200MHz)對相位噪聲測量的影響。
藍(lán)色 = 1GSa/s,綠色 = 5GSa/s,紅色 = 10GSa/s,藍(lán)綠色 = 20GSa/s。
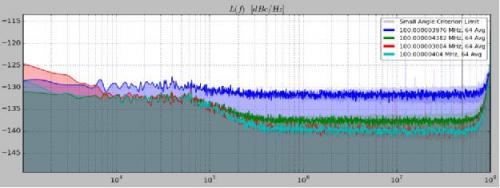
圖 5
可以看到改變采樣率最終會影響相位噪聲測量的本底噪聲。在本例中,20GSa/s 和 10GSa/s 時沒有明顯區(qū)別,但采樣率更低時結(jié)果中的噪聲有所增加。影響的程度取決于信號邊沿的形狀和轉(zhuǎn)換率。
數(shù)據(jù)信號的相位噪聲
示波器采用時鐘恢復(fù)算法提取 TIE 信息,這種方法的優(yōu)勢是能夠測量數(shù)據(jù)信號的相位噪聲。下面(圖 6)是對高速碼型發(fā)生器進(jìn)行相位噪聲測量的實(shí)例。該測量中唯一的不同是所使用的碼型。藍(lán)色是偽隨機(jī)位序列,綠色是重復(fù)的 1-0 時鐘碼型。
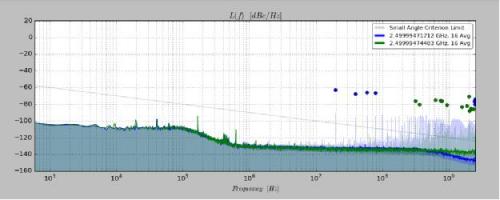
圖 6
高頻率偏移時相位噪聲有所不同,這是由發(fā)生器本身特性決定的。
總結(jié)
總之,盡管實(shí)時采樣示波器并非相位噪聲測量的第一選擇,但根據(jù)測量要求的不同,仍可作為可接受的選項。對于近載波相位噪聲測量(一般小于 1kHz),專用的相位噪聲分析儀或頻譜分析儀可以帶來更快、更精確的測量。但測量相對低成本的振蕩器和 PLL 電路,或需要高帶寬時,配備純凈的時基和低噪聲前端的示波器也可以完成測量。此外,使用實(shí)時示波器還有一個好處,如果使用了串行數(shù)據(jù)時鐘恢復(fù)法,它還可以從串行信號中提取相位噪聲。

評論