基于PIC單片機(jī)的同步電動機(jī)新型智能勵磁控制系統(tǒng)的設(shè)計

1 引言
同步電動機(jī)運(yùn)行穩(wěn)定性和可靠性對工業(yè)生產(chǎn)有重要的影響。單片機(jī)用于同步電動機(jī)勵磁控制由于軟件豐富,能使勵磁裝置結(jié)構(gòu)簡化、功能增多且易于實(shí)現(xiàn)復(fù)雜的控制規(guī)律,同時還具有參數(shù)整定靈活,使用維護(hù)方便和故障自診斷功能。目前,國內(nèi)許多基于單片機(jī)的同步電動機(jī)勵磁控制系統(tǒng)與傳統(tǒng)的模擬勵磁控制系統(tǒng)相比性能有很大的提高,但因?yàn)椴捎玫?a class="contentlabel" href="http://www.ex-cimer.com/news/listbylabel/label/單片機(jī)">單片機(jī)內(nèi)部資源較少使得單片機(jī)外圍電路復(fù)雜,其內(nèi)部控制程序采用查表的方法,這樣影響了整個勵磁控制系統(tǒng)的精度、快速性和穩(wěn)定性。PIC16F877單片機(jī)內(nèi)部資源豐富,廣泛應(yīng)用于工業(yè)控制領(lǐng)域。我們研制了基于PIC16F877單片機(jī)的同步電動機(jī)新型智能勵磁控制系統(tǒng),控制程序可以實(shí)時計算,利用內(nèi)部的捕捉單元可以很容易實(shí)現(xiàn)自動投勵、全壓投切電路。同時我們通過控制晶閘管移相整流模塊的控制端電壓來控制整流模塊的輸出,使得整個系統(tǒng)硬件電路簡單、調(diào)試維護(hù)方便、系統(tǒng)性能較高。
2 系統(tǒng)組成與工作原理
同步電動機(jī)新型智能勵磁控制系統(tǒng)的硬件結(jié)構(gòu)圖如圖1所示。包括整流變壓器、晶閘管移相整流模塊、滅磁電路、投勵投全壓信號轉(zhuǎn)換電路、勵磁電流反饋信號轉(zhuǎn)換電路、PIC單片機(jī)控制電路、鍵盤及液晶顯示電路、保護(hù)跳閘電路、RS-232C接口電路。
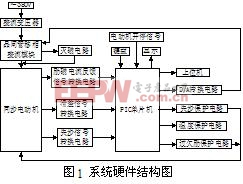
當(dāng)同步電動機(jī)的定子合上電源時,同步電動機(jī)進(jìn)入異步運(yùn)行狀態(tài),通過單片機(jī)的I/O口控制滅磁繼電器使滅磁電路工作,轉(zhuǎn)子感應(yīng)交變電壓的正負(fù)半波都通過滅磁電阻,且正負(fù)半波電流對稱,以保證同步電動機(jī)具有良好的異步驅(qū)動特性。在此期間單片機(jī)控制晶閘管移相整流模塊的輸出為零。同步發(fā)電機(jī)的投全壓、投勵時刻通過檢測電機(jī)的滑差確定。當(dāng)轉(zhuǎn)速上升到同步轉(zhuǎn)速的90%左右投全壓;當(dāng)轉(zhuǎn)速上升到同步轉(zhuǎn)速的95%左右采用“超前順極性投勵”方式,自動準(zhǔn)確的選擇在最佳的分離角處投勵。同時系統(tǒng)具有后備時間投全壓、投勵環(huán)節(jié)(可以通過鍵盤設(shè)置)。投勵之后,斷開滅磁電路,單片機(jī)PWM輸出引腳的輸出經(jīng)光耦隔離、施密特整型電路、濾波電路之后控制晶閘管移相整流模塊的控制端電壓,晶閘管移相整流模塊的輸出直流電壓施加于電動機(jī)勵磁繞組兩端,同步電動機(jī)被牽入同步運(yùn)行,起動完畢。
同步電動機(jī)正常運(yùn)行時,系統(tǒng)對勵磁電流進(jìn)行閉環(huán)PID調(diào)節(jié)實(shí)現(xiàn)恒流勵磁,勵磁電流不受交流電網(wǎng)波動及勵磁繞組熱態(tài)電阻變化的影響,并且可以通過鍵盤改變勵磁電流的大小。通過調(diào)節(jié)勵磁電流的大小可以調(diào)節(jié)同步電動機(jī)的功率因數(shù)。
由于某些因素造成過勵、欠勵、失步時單片機(jī)可以自動檢測,經(jīng)延時后自動給出跳閘信號并顯示故障類型。單片機(jī)自動檢測勵磁裝置溫度,并與溫度設(shè)定值比較自動開停風(fēng)機(jī)。
3 硬件電路設(shè)計
3.1 PIC16F877單片機(jī)控制單元
PIC16F877具有高性能類RISC CPU,20MHz時鐘輸入時,指令周期為200ns,8K字(14位字長)的FLASH程序存儲器,368字節(jié)的RAM,256字節(jié)的EEPROM,帶有片內(nèi)RC振蕩器的WDT以保證可靠工作[3]。PIC16F877有強(qiáng)大的外圍功能模塊,有三個定時器,16位捕捉輸入的最大分辨率為12.5ns,脈寬調(diào)制(PWM)輸出的最大分辨率為10位,10位多通道A/D轉(zhuǎn)換器。PIC16F877還具有多達(dá)14個的內(nèi)部/外部中斷源。
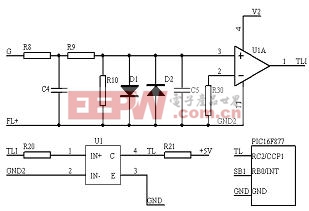
3.2 滑差信號捕捉電路
滑差信號捕捉電路如圖2所示。對電機(jī)滑差大小的檢測是根據(jù)轉(zhuǎn)子回路內(nèi)測取的轉(zhuǎn)子電壓波形經(jīng)過零比較電路轉(zhuǎn)換成方波,通過光耦隔離輸入PIC16F877的CCP1捕捉引腳,根據(jù)捕捉到的方波脈沖寬度可以準(zhǔn)確的確定投全壓、投勵時刻。通過控制單片機(jī)的I/O口與隔離電路控制相應(yīng)的繼電器以實(shí)現(xiàn)投勵、投全壓動作。

相關(guān)推薦










技術(shù)專區(qū)
- FPGA
- DSP
- MCU
- 示波器
- 步進(jìn)電機(jī)
- Zigbee
- LabVIEW
- Arduino
- RFID
- NFC
- STM32
- Protel
- GPS
- MSP430
- Multisim
- 濾波器
- CAN總線
- 開關(guān)電源
- 單片機(jī)
- PCB
- USB
- ARM
- CPLD
- 連接器
- MEMS
- CMOS
- MIPS
- EMC
- EDA
- ROM
- 陀螺儀
- VHDL
- 比較器
- Verilog
- 穩(wěn)壓電源
- RAM
- AVR
- 傳感器
- 可控硅
- IGBT
- 嵌入式開發(fā)
- 逆變器
- Quartus
- RS-232
- Cyclone
- 電位器
- 電機(jī)控制
- 藍(lán)牙
- PLC
- PWM
- 汽車電子
- 轉(zhuǎn)換器
- 電源管理
- 信號放大器
評論