圖4參數(shù)自調(diào)整的模糊控制框圖
5仿真研究
在Matlab/Simulink仿真環(huán)境下�����,根據(jù)前面的設(shè)計����,采用永磁同步電動機模型構(gòu)建多電機同步控制系統(tǒng)仿真框圖��。圖5為采用模糊控制補償器的情況下三電動機速度響應(yīng)曲線圖��。
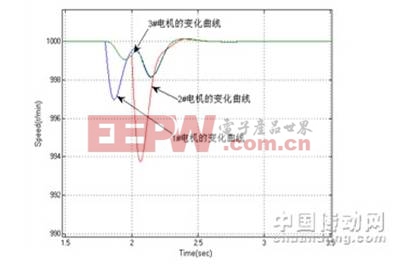
圖5電動機速度響應(yīng)曲線
由仿真結(jié)果比較可以看出:采用模糊控制器的補償方法時候�����,系統(tǒng)的同步性能�����、抗干擾性能力強��,因而適合同步精度要求較高的場合��。


評論