
步驟2 模型條件濾波:
對(duì)應(yīng)于模型Mj(k)�,以X 0j
(k - 1|k - 1)�,P0j(k - 1|k - 1)及Z(k)作為輸入進(jìn)行卡爾曼濾波。
卡爾曼預(yù)測(cè)方程:

預(yù)測(cè)誤差協(xié)方差陣:

卡爾曼增益:

濾波方程為:

波誤差方差陣:

步驟3 模型概率更新:
i = 1rΛj(k)cj_�,而Λj(k)為觀測(cè)Z(k)的似然函數(shù):
其中:

步驟4 輸出交互:
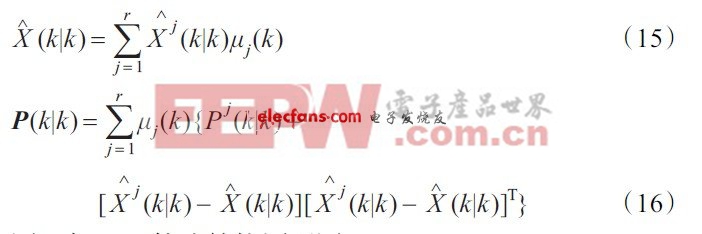
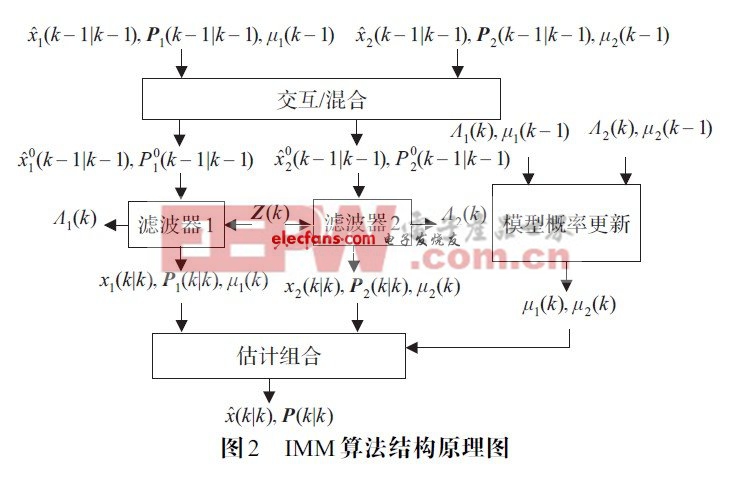
圖2 為IMM算法結(jié)構(gòu)原理圖







評(píng)論