
本文引用地址:http://www.ex-cimer.com/article/81035.htm
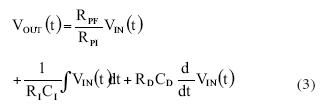
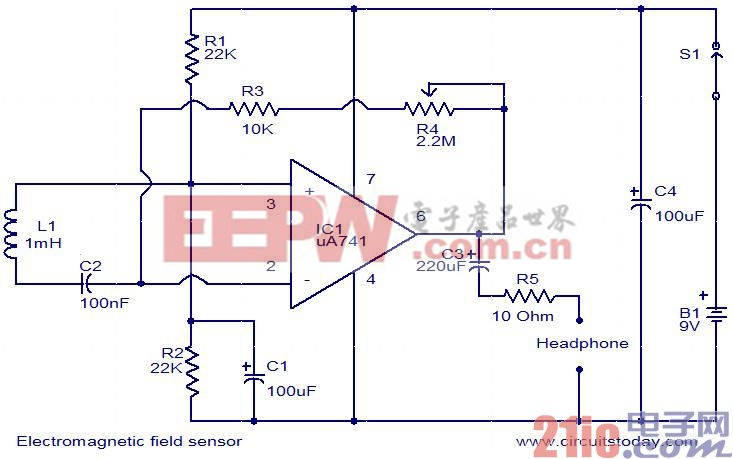
方程1不僅僅可以直接適用于大多數(shù)格式的軟件,而且也可以用模擬電路實(shí)現(xiàn)(見(jiàn)圖1)���。用通用運(yùn)放IC1���、IC2、IC3和IC4分別做為調(diào)整放大器���、積分器���、微分器和求和放大器���,這些都是典型的配置���。傳感器檢測(cè)的過(guò)程變量是電壓V1N和電路控制響應(yīng)電壓VOUT���,它們的關(guān)系為:









評(píng)論